




سروو موتور چیست؟
سرووموتور یک عملگر چرخشی یا خطی است که امکان کنترل دقیق زاویه یا حرکت خطی، سرعت و شتاب، با استفاده از آن امکان پذیر است. چنانچه بخواهید یک شیء را در یک زاویه خاص بچرخانید یا آن را در یک فاصله مشخص به صورت خطی حرکت دهید، می توانید از سروو موتور استفاده کنید.

سیستم سروو، شامل یک موتور معمولی بوده که به شفت آن یک انکودر نصب شده است و توسط یک سیستم کنترل می گردد. با ارسال یک سیگنال کنترلی به سرووموتور امکان حرکت شفت به یک زاویه یا موقعیت خاص وجود دارد. سرووموتور در موقعیت شفت فرمان داده شده باقی می ماند تا زمانی که سیگنال تغییر کند، با تغییر سیگنال فرمان، موقعیت و زاویه شفت تغییر خواهد کرد.
سرووموتور در واقع، یک مکانیسم حلقه بسته خودکار جهت راه اندازی ماشین ها می باشد که از فیدبک موقعیت برای کنترل حرکت و رسیدن به موقعیت نهایی استفاده می کند. ورودی سیستم کنترلی سرووموتور یک سیگنال آنالوگ یا دیجیتال است که دستورات موقعیت را به شفت خروجی اعلام می کند. یک انکودر به شفت موتور متصل می شود تا فیدبک موقعیت و سرعت را به سیستم کنترل ارسال کند. در ساده ترین مورد، فقط موقعیت، اندازه گیری می شود. موقعیت اندازه گیری شده در خروجی با دستور موقعیت ارسالی از سیستم کنترل و عدد تعریف شده که بصورت دستی برای سیستم کنترل تعریف شده است، مقایسه می شود. چنانچه موقعیت خروجی با مقدار تعریف شده و مورد نیاز تفاوت داشته باشد، یک سیگنال خطا تولید می شود که موجب شده موتور در هر دو جهت بچرخد تا آنجا که خروجی شفت را به موقعیت مناسب برساند. زمانیکه شفت به موقعیت مورد نظر می رسد، سیگنال خطا به مقدار صفر رسیده و موتور می ایستد.
انواع سروو موتور
اصطلاح سرووموتور اغلب برای موتوری بکار می رود که برای استفاده در سیستم کنترل حلقه بسته مناسب باشد و از انواع موتور ها ممکن است برای این منظور استفاده شود.
سروو موتورها را می توان بر اساس برق مصرفی و کاربردشان به انواع زیر تقسیم بندی کرد:
- سرو موتور AC
- سرو موتور DC

سروو موتورهای RC، سروو موتورهای کوچکی هستند که امکان راه اندازی آنها با باتری یا برق DC از 100 میلی آمپر تا 2 آمپر وجود دارد. به دلیل توانایی، قابلیت اطمینان و سادگی کنترل با میکروپروسسورها، از سروو موتورهای RC، برای سیستم های رباتیک و تجهیزات کوچک استفاده می شود. همچنین از انواع سروو موتورهای توان بالا که از برق AC تغذیه می کنند در موارد صنعتی استفاده می شود.
ساده ترین سروو موتورها، از طریق یک پتانسیومتر فقط موقعیت را سنس می کنند و موتور همیشه در سرعت کامل خود می چرخد (یا می ایستد). معمولا از این نوع سروو موتورها بصورت وسیعی در صنعت کنترل موقعیت استفاده نمی شود، اما در عوض این مدل های ساده و ارزان قیمت سروو، در سیستم های کنترل رادیویی مورد استفاده قرار می گیرد.
سروو موتورهای پیچیده تر، برای اندازه گیری سرعت شفت خروجی از انکودر های نوری و برای کنترل سرعت موتور از درایو های کنترل سرعت متغیر (Variable-Speed Drive) استفاده می کنند. استفاده از این دو آپشن، معمولا در ترکیب با یک الگوریتم PID، به سروو موتور این امکان را می دهد که سریع تر و دقیق تر، خود را با کمترین خطا به وضعیت فرمان موقعیت ارسال شده برساند.
مشخصات فنی شناسایی یک سروو موتور
سروو موتورها مثل انواع موتورهای دیگر خصوصیات مشخصی دارند مثل ولتاژ، جریان، سرعت عملکرد، گشتاور، پالس کنترلی، رزولوشن، پالس و وزن.
- ولتاژ تغذیه و جریان: ولتاژ تغذیه و مقدار جریان برای هر سروو موتور بر اساس کاربرد آن مشخص می شود. معمولا سروو موتورهای RC، دارای ولتاژ تغذیه 4 الی 6 ولت و جریان 100 میلی آمپر الی 2 آمپر می باشند.
- سرعت عملکرد: سرعت یک سروو موتور بر حسب زمان مورد نیاز شفت جهت رسیدن به یک موقعیت معلوم، مشخص می شود.
- گشتاور: گشتاور با سرعت سروو موتور نسبت عکس دارد. هرچه سرعت یک سروو موتور با یک توان مشخص بالاتر باشد، گشتاور آن پایین تر می آید.
- پالس کنترلی: از پالس کنترلی برای تعیین موقعیت شفت استفاده می شود.
- رزولوشن: رزولوشن دقت موقعیت شفت را در زمان دریافت سیگنال فرمان مشخص می کند. معمولا رزولوشن سروو موتورها بین 1 تا 10 درجه است.
- سایز و وزن: این خصوصیات در طراحی مکانیکی پروژه حائز اهمیت است. وزن سروو موتورهای RC، بین 15 تا 200 گرم است.
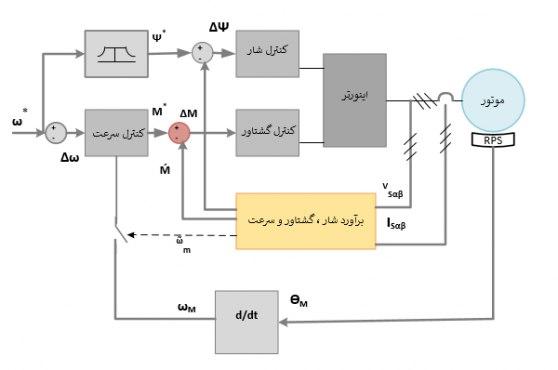
ساختار یک سروو موتور
بلوک دیاگرام کنترلی سرووموتور
انکودر ها
اولین سروو موتورهای تولید شده از یک سری همگام ساز به جای انکودر استفاده می کردند. طی جنگ جهانی دوم بسیاری از سیستم ها نظیر رادارها و ضد هوایی ها از این نوع سروو موتورها استفاده می کردند.
سروو موتورهای ساده از پتانسیومترهای مقاومتی به جای انکودر برای تشخیص موقعیت استفاده می کنند. از این مدل سروو موتورها در سیستم های بسیار ساده و ارزان قیمت استفاده می شود و در رقابت بسیار نزدیکی با استپرموتورها می باشند. پتانسیومتر باعث ایجاد نویز الکتریکی و سایش در این سروو موتورها می شود.
سروو موتورهای مدرن از انکودر های چرخشی مطلق (Absolute) یا افزایشی (Incremental) استفاده می کنند. انکودر های مطلق زمانی که برق وصل است قادر به تشخیص موقعیت بوده، اما بسیار پیچیده تر و گران تر هستند. انکودرهای افزایشی ساده تر و ارزان تر می باشند و با سرعت بالاتری کار می کنند. سیستم های افزایشی (Incremental) مانند استپرموتورها، اغلب با استفاده از قابلیت داخلی خود که یک سنسور تشخیص موقعیت صفر می باشند، اندازه گیری وقفه های چرخش و تنظیم موقعیت خود در زمان استارت موتور، را انجام می دهند.
گاهی اوقات به جای سرو موتور ها، از یک موتور با یک انکودر خطی خارجی جداگانه استفاده می شود. این موتور ها با ترکیب سیستم های انکودر خطی، خطای ایجاد شده در انتقال قدرت از موتور به حرکت خطی را از بین می برد، اما به دلیل اینکه پکیج انکودر خطی و موتور در کارخانه مونتاژ به هم متصل نشده، کار طراحی، متفاوت تر و پیچیده تر می باشد.
مزیت سروو موتور ها نسبت به استپر موتور
تفاوت اصلی سروو موتورها و استپر موتورها، در نوع استفاده از فیدبک است. انکودر نصب شده بر روی شفت سروو موتورها، موقعیت واقعی شفت سروو موتور را به سیستم کنترل گزارش می دهد. بنابراین، کنترلر سروو موتور در زمان سیگنال خطا می تواند دستور مناسب را ارسال کند. اما استپر موتورها فقط می توانند فرمان حرکت را صادر کنند و کاربر هیچ راهی جهت اطمینان از اینکه موتور به موقعیت مطلوب رسیده است ندارد. در سیستم های سروو موتور، همیشه مشخص است که موتور در چه موقعیتی قرار دارد، بنابراین همه دستورات انجام می شود و هیچ پالسی گم نمی شود.
سروو موتورها در گشتاور کامل و سرعت بالا کار می کنند در حالی گشتاور استپر موتور ها افت می کند و متعاقبا سرعت آن افزایش می یابد. این مشکل استپرموتور ها به دلیل ثابت زمانی الکتریکی و مصرف جریان ضعیف می باشد.
سروو موتورها به دلیل استفاده از انکودرهای با رزولوشن بالا، ذاتا بسیار نرم هستند و تعداد موقعیت های آن حداقل 10 برابر تعداد موقعیت های استپر موتور در یک چرخش می باشد.
سروو موتورها فقط به مقدار مورد نیاز برق مصرف می کنند و مصرف توان به میزان گشتاور بار اعمال شده به موتور دارد. در صورتیکه استپر موتور ها جریان کامل را مصرف می کنند حتی زمانی که در حالت بی باری هستند.
برندهای سروو موتور
- سروو موتور دلتا
- سروو موتور ال اس
- سروو موتور کینکو
- سروو موتور زیمنس
- سروو موتور استون
کاربرد سروو موتور
سروو موتور در صنایع مختلف در بخش اتوماسیون صنعتی از جمله موارد زیر کاربرد دارد:
- در دوربین ها برای تنظیم لنز دوربین و زوم عکس
- کنترل وسایل رباتیک شامل کنترل چرخ ها، کنترل سرعت، تولید گشتاور های مختلف برای حرکت، استپ و استارت ربات
- کنترل زاویه چرخش در سولار پنل ها، به نحوی که پنل رو به تابش نور خورشید قرار بگیرد.
- دستگاه های برش و فرم دهی قطعات
- ماشین های بافت صنایع منسوجات
- باز و بسته شدن درب های اتوماتیک در مکان های عمومی مثل بیمارستان ها، سالن های تئاتر سوپرمارکت ها و غیره
- آنتن های ردیاب ماهواره
- سیستم های اتوماتیک هدایت قایق ها و هواپیماها
- مسلسل های ضد هوایی

دیـــدگاهها
شما هم درباره این کالا دیدگاه ثبت کنید.