مشخصات فنی انکودر چرخشی
روتاری انکودر یا شفت انکودر، یک دیوایس الکترومکانیکی، که وضعیت زاویه ایی و یا حرکت یک شفت یا محور به یک کد دیجیتال یا آنالوگ تبدیل می نماید. روتاری انکودرها به دو نوع اصلی افزایشی و مطلق دسته بندی می شوند. خروجی روتاری انکودر مطلق، موقعیت شفت را در همان لحظه نشان می دهد. خروجی روتاری انکودر افزایشی، اطلاعاتی در خصوص حرکت شفت به ما می دهد که در جایی دیگر به اطلاعاتی نظیر سرعت، مسافت و موقعیت تبدیل می شود.

روتاری انکودر ها، در کاربردهای متعددی که نیاز به گردش بسیار دقیق شفت دارند، مورد استفاده قرار می گیرند. کاربردهایی نظیر: کنترل صنعتی، رباتیک، لنزهای عکاسی با کاربری خاص، تجهیزات ورودی کامپیوتر نظیر موس های نوری مکانیکی، و پلت فرم های رادار دوار.
تکنولوژی هایی که در ساخت انکودر مورد استفاده قرار می گیرد:
انکودر نوری
در این تکنولوژی، یک نور از راه شکاف درون یک دیسک شیشه ایی یا فلزی به سمت یک دیود نوری تابانده می شود. این تکنولوژی، یکی از رایج ترین تکنولوژی هاست. انکودرهای نوری، به گرد و غبار بسیار حساس هستند.
انکودر مغناطیسی On-Axis
در این تکنولوژی، نوعا از یک مگنت نئودیمیوم 2 پل، مغناطیس شده که سایز آن با سایز شفت موتور یکسان است، استفاده می شود. دقت در این تکنولوژی بسیار پایین است و آپشن های رزولوشن زیادی به ما نمی دهد. در این تکنولوژی، عموما امکان گرفتن خروجی های پالس Z و یا UVW وجود ندارد. به دلیل استفاده از مگنت 2 پل، اعوجاج زیادی در خروجی وجود دارد.
انکودر مغناطیسی Off-Axis
در این تکنولوژی، عموما از مگنت های فریت دورپیچی شده در لاستیک که به یک توپی فلزی متصل است استفاده می شود و این موضوع امکان انعطاف پذیری در طراحی و هزینه پایین برای کاربردهای عمومی را فراهم می کند. به دلیل انعطاف پذیری در بسیاری از چیپ های انکودر Off-Axis، می توان آنها را برنامه ریزی کرد تا هر تعداد پهنای pole را قبول کنند لذا می توان چیپ را متناسب با کاربرد در هر موقعیتی قرار داد. از انکودرهای معناطیسی می توان در محیط های خشن که انکودرهای نوری قادر به کار نیستند استفاده کرد.
انکودر Absolute و Incremental
در یک انکودر Absolute، زمانیکه برق از سیستم برداشته می شود، اطلاعات موقعیت در انکودر حفظ می شود و به محض وصل مجدد برق اطلاعات قابل برداشت است. رابطه بین مقدار انکودر و موقعیت فیزیکی ماشینی که قرار است کنترل شود در زمان مونتاژ تنظیم شده است؛ و جهت حفظ دقت، نیازی نیست که سیستم به نقطه کالیبره برگردد.
یک انکودر Incremental، تغییرات موقعیت را بطور دقیق ثبت می کند اما یک رابطه ثابت بین وضعیت انکودر و وضعیت فیزیکی وجود ندارد. تجهیزاتی که با انکودرهای Incremental کنترل می شوند، جهت مقداردهی اولیه به نقطه مرجع ثابت، باید به محل ساخت خود برگردند.
روتاری انکودرهای multi-turn Absolute، شامل کدهای اضافه برای چرخ ها و gear ها هستند. یک چرخ با دقت بالا، چرخش های بسیار کوچک را اندازه گیری می کند و چرخ هایی با رزولوشن پایین، تعداد دور کامل یک شفت را اندازه گیری می کند.
یک انکودر Absolute، دارای کدرینگ های چندگانه با اوزان باینری متفاوت می باشد می باشد که یک کلمه دیتا را تولید می کند، این کلمه نمایانگر موقعیت مطلق انکودردر یک دور کامل است. این تایپ انکودر اغلب به نام انکودر Absolute پارالل شناخته می شود.
یک انکودر Incremental، بطور متفاوتی کار می کند به این صورت که خروجی پالس َA و B تولید می کند و اطلاعات قابل شمارشی به ما نمی دهد و شمارش در یک دستگاه الکترونیک خارجی ( کانتر) انجام می شود. نقطه ایی که شمارش وابسته به کانتر دستگاه الکترونیکی خارجی شروع می شود و نه بسته به موقعیت انکودر. جهت تولید اطلاعات موقعیت قابل استفاده، وضعیت اکودر باید به عنوان رفرنس دستگاه الکترونیکی متصل به آن قرار بگیرد، اینکار عموما با استفاده از یک پالس مرجع صورت می گیرد.
روتاری انکودر Absolute
انکودرهای Absolute دیجیتال، برای هر زاویه مشخص شفت، یک کد دیجیتالی واحد تولید می کنند. آنها در دو نوع اصلی مکانیکال و نوری ساخته می شوند.
یک دیسک فلزی، شامل یک ست حلقه های متمرکز به یک دیسک عایق متصل شده است که این ترکیب به شفت بصورت محکم وصل شده است. یک ردیف کنتاکت های لغزان به یک شی ساکن فیکس شده است بطوریکه هر کنتاکت در فاصله ای متفاوت از شفت به دیسک فلزی مالش پیدا می کند. زمانیکه دیسک همراه با شفت می چرخد، بعضی از کنتاکت ها با دیسک فلزی برخورد پیدا می کنند در حالیکه مابقی کنتاکتها در شکاف هایی می افتند که دیسک آنها را قطع کرده است. صفحه فلزی به یک منبع جریان الکتریکی متصل است و هر کنتاکت به یک سنسور الکتریکی جداگانه وصل شده است. قالب فلزی طوری طراحی شده است که همه وضعیت های ممکن محور را به یک کد باینری خاص تبدیل می کند(کنتاکت هایی که به مدار الکتریکی وصل هستند on و کنتاکتهایی که وصل نیستند کد off را تولید می کنند یعنی همان اعداد باینری یا صفر و یک. به دلیل اینکه کنتاکت های brush-type، دچار فرسایش می شوند، انکودرهایی که از کنتاکت استفاده می کنند رایج نیستند. آنها را می توان در کاربردهای با سرعت پایین نظیر ولوم های دستی، کنترل های تیونینگ، و گیرنده های رادیویی دید.
دیسک انکودر نوری، از پلاستیک و یا شیشه ساخته شده است و دارای مناطق شفاف و غیر شفاف می باشد. یک منبع نور و یک آشکارساز نور، طرح های نوری ایجاد شده ناشی از موقعیت دیسک در هر لحظه را می خواند. اغلب از کد گری (Gray code) استفاده می شود. این کد توسط یک دستگاه کنترلی نظیر یک میکروپروسسور یا میکروکنترلر جهت تعیین زاویه شفت قابل خواندن است.
انکودرهای Absolute نوری آنالوگ، یک کد آنالوگ دوتایی منحصر به فرد، تولید می کند که قابل تبدیل به زاویه مطلق شفت است.
در انکودرهای مغناطیسی از یک سری پل های مغناطیسی (2 یا بیشتر) جهت نشان دادن وضعیت انکودر به یک سنسور مغناطیسی استفاده می شود. سنسور مغناطیسی، وضعیت پل های مغناطیسی را می خواند.
این کد توسط دستگاه های کنترلی نظیر میکروپروسسور یا میکروکنترلر جهت تعیین زاویه شفت قابل خواندن می باشد. (همانند انکودرهای نوری) نوع آنالوگ آن ف یک کد دوتایی منحصر به فرد، تولید می کند که قابل تبدیل به زاویه مطلق شفت است. (با استفاده از یک الگوریتم خاص)
یک دیسک با شکلی نامتقارن درون انکودر می چرخد. این دیسک ظرفیت خازنی بین دو الکترود را تغییر می دهد که قابل اندازه گیری و محاسبه به مقدار زاویه است.
- انکودر Absolute مولتی ترن (multi-turn)
یک انکودر multi-turn، میتواند بیش از یک چرخش کامل را بخواند و ذخیره کند. اصطلاح انکودر مولتی ترن absolute، زمانی استفاده می شود که انکودر حرکت شفت خودش را حتی زمانیکه به منبع تغذیه خارجی متصل نیست تشخیص دهد و بخواند.
انکودرهای مولتی ترنی که با باتری کار می کنند.
این نوع انکودر از یک باتری جهت حفظ شمارش استفاده می کند و انرژی الکتریکی را جهت آشکارسازی حرکت شفت ذخیره می کند.
این انکودرها از یک رشته چرخ دنده استفاده می کنند و بصورت مکانیکال تعداد چرخش ها را ثبت می کنند. و ضعیت هر کدام از چرخ دنده ها با یکی از تکنولوژی های توضیح داده شده در بالا مشخص می شود.
- انکودر مولتی ترن Self-Powered
این انکودرها از اصل برداشت انرژی از شفت متحرک استفاده می کنند. این اصل که در سال 2007 معرفی شد از یک سنسور Wiegand جهت تولید الکتریسیته کافی برای پاور انکودر استفاده می کند و تعداد دورها را بر روی یک حافظه غیر فرار می نویسد (حافظه ایی که با قطع توان الکتریکی پاک نمی شود.).
روش های رمز گذاری کردن یا کد کردن وضعیت شفت
روش استاندارد کدهای باینری

یک مثال از کد باینری در یک انکودر بسیار ساده که تنها دارای 3 کنتاکت است در جدول زیر نشان داده شده است:
مثالی از کد باینری
| Sector |
کنتاکت 1 |
کنتاکت 2 |
کنتاکت 3 |
Angle |
| 0 |
Off |
Off |
Off |
0 تا 45 درجه |
| 1 |
Off |
Off |
On |
45 تا 90 درجه |
| 2 |
Off |
On |
Off |
90 تا 135 درجه |
| 3 |
Off |
On |
On |
135 تا 180 درجه |
| 4 |
On |
Off |
Off |
180 تا 225 درجه |
| 5 |
On |
Off |
On |
225 تا 270 درجه |
| 6 |
On |
On |
Off |
270 تا 315 درجه |
| 7 |
On |
On |
On |
315 تا 360 درجه |
در مثال فوق، کنتاکت ها یک شمارش استاندارد باینری متناسب با چرخش دیسک تولید می کنند. هرچند، زمانیکه دیسک بین دو سکتور همجوار استپ کند و یا اینکه کنتاکت ها درست تنظیم نشوند، یک اشکال بوجود می آید و تشخیص زاویه شفت غیر ممکن خواهد بود. برای نشان دادن این مشکل، در نطر بگیرید زمانیکه زاویه شفت از 179. 9 ͦ به 180. 1 ͦ تغییر می کند چه اتفاقی می افتد(تغییر از سکتور 3 به سکتور 4).
مطابق جدول فوق، الگو از حالت off-on-on به حالت on-off-off تغییر می کند. هرچند این چیزی نیست که در واقعیت اتفاق می افتد. در یک تجهیز واقعی، کنتاکت ها به هیچ وجه بطور کامل تنظیم نیستند بنابراین هرکدام در لحطه ایی متفاوت سوئیچ می کنند. اگر ابتدا کنتاکت 1 سوئیچ کند با کنتاکت 2 و سپس 3 دنبال می شود. به عنوان مثال ترتیب واقعی کد به شرح زیر است:
- Off-on-on (starting position)
- On-on-on (first, contact 1 switches on)
- On-on-off (next, contact 3 switches off)
- On-off-off (finally, contact 2 switches off)
حالا به کدهای متناظر با این سکتورها در جدول فوق نگاه کنید. ردیف 3، 7، 6 و سپس 4. پس بنابر ترتیب کدهای تولید شده به نظر می رسد که شفت از سکتور 3 به سکتور 7 پرش کرده است سپس به سکتور 6 و 4 برگشته است.
در بسیاری از موقعیت ها، رفتار انکودر مطلوب نیست و می تواند منجر به خطای سیستم شود. به عنوان مثال انکودری که در بازوی یک رباط استفاده شده، کنترلر رباط ممکن است برداشت کند که بازوی رباط در موقعیت صحیح قرار ندارد و با برگشت آن به 180 درجه اقدام به تصحیح خطا کند که این موضوع احتمالا موجب آسیب به رباط خواهد شد.
روش کدگذاری گری (Gray coding)

جهت جلوگیری از مشکل فوق از روش کدینگ گری استفاده می شود. این کدینگ یک سیستم شمارش باینری است که هر دو کد مجاورتنها دریک موقعیت بیت تفاوت دارند. برای 3 کنتاکت مثال بالا ورژن گری کد به شرح جدول زیر می باشد:
مثالی از کدگذاری گری
| Sector |
کنتاکت 1 |
کنتاکت 2 |
کنتاکت 3 |
Angle |
| 0 |
Off |
Off |
Off |
0 تا 45 درجه |
| 1 |
Off |
Off |
On |
45 تا 90 درجه |
| 2 |
Off |
On |
On |
90 تا 135 درجه |
| 3 |
Off |
On |
Off |
135 تا 180 درجه |
| 4 |
On |
On |
Off |
180 تا 225 درجه |
| 5 |
On |
On |
On |
225 تا 270 درجه |
| 6 |
On |
Off |
On |
270 تا 315 درجه |
| 7 |
On |
Off |
Off |
315 تا 360 درجه |
در این مثال، گذر از سکتور 3 به سکتور 4، نظیر همه گذرهای دیگرشامل تنها یک کنتاکت است که از وضعیت on به off و بالعکس تغییر حالت می دهد. و این به آن معنا است که توالی کد های غیر صحیح نشان داده شده به شکل قبل نمی تواند اتفاق بیفتد.
کدینگ گری به شکل Single-Track
چنانچه طراح، یک کنتاکت را به وضعیت زاویه ایی متفاوتی تغییر بدهد (با حفظ فاصله یکسان از مرکز شفت)، لازم است که الگوی رینگ متناظر آن، به زاویه ایی مشابه چرخانده شود تا خروجی درست و متناظری ایجاد کند. چنانچه مهمترین بیت (رینگ داخلی در شکل 1) به اندازه کافی چرخانده شود، دقیقا با رینگ خروجی بعدی، نظیر می شود. از ۀنجا که در این مرحله هر دو رینگ، همانند و یکسان هستند، می توان رینگ داخلی را حذف کرد، و سنسور مربوط به این رینگ به رینگ مشابه باقی مانده منتقل می شود وحالا رینگ باقی مانده دارای دو سنسور خواهد بود.
امکان اینکه چندین سنسور در اطراف یه Track (رینگ) چیده شود وجود دارد بطوریکه وضعیت های متوالی تنها در یک سنسور تفاوت داشته باشد. نتیجه یک انکودر با گری کد Single Track می باشد.
تکنیک های خروجی انکودر Absolute
در انکودرهای Absolute تجاری، تکنیک های زیادی برای ارسال داده انکودر Absolute وجود دارد شامل باینری موازی، جریان آنالوگ، ولتاژ آنالوگ، PWM، اینترفیس SSI، ISI، پروفیباس، پروفی نت، اترنت پاورلینک، اترنت TCP/IP ،Modebus ،Device Net ،CAN open ،EtherCAT ،Endat و Hiperface، که بسته به سازنده انکودر، هر کدام از این موارد مورد استفاده قرار می گیرد.
روتاری انکودرهای Incremental
یک روتاری انکودر Incremental، زمانیکه انکودر می چرخد، تنها خروجی های گردشی تولید می کند. این انکودرها، می تواند مکانیکال، نوری و یا مغناطیسی باشد. نوع مکانیکال باید مجهز به تکنیک جلوگیری از بسته شدن نادرست کلید باشد و نوعا از یک پتانسیومتردیجیتال در تجهیز استفاده می شود که شامل یک سری تجهیزات مصرف کننده است. اکثر استریوهای خانگی و استریوهای اتوموبیل برای کنترل ولوم، از روتاری انکودرهای Incremental استفاده می کنند. روتاری انکودرهای Incremental مکانیکال، دارای سرعت چرخش محدود هستند.
روتاری انکودرهای Incremental، به دلایل زیر از پرکاربردترین روتاری انکودرها هستند:
- هزینه پایین و توانایی آنها در تولید سیگنال هایی که به راحتی به وضعیت حرکتی متناظر مثل سرعت، قابل ترجمه هستند.
- انکودرهای Incremental، تنها از دو سنسور استفاده می کنند اما این موضوع به هیچ عنوان رزولوشن آنها را تحت تاثیر قرار نمی دهد. انکودرهای موجود در بازار، قابلیت شمارش بالای 10,000 شمارش در دور را دارند.
- در این انکودرها، یک خروجی سوم می تواند بصورت Optional ارائه شود، خروجی رفرنس یا index، این خروجی در هر دور تنها یکبار اتفاق می افتد و در جایی مورد استفاده قرار می گیرد که نیاز به رفرنس absolute می باشد مانند سیستم های تعیین موقعیت. این خروجی index معمولا به نام خروجی Z شناخته می شود.
- انکودرهای Incremental، جهت رهگیری حرکت (حرکت خطی یا دورانی) مورد استفاده قرار می گیرند، همچنین می توان از آنها جهت تعیین موقعیت و سرعت استفاده کرد. در این انکودرها، جهت قابل تشخیص است به همین دلیل می توان اندازه گیری های بسیار دقیقی انجام داد.
- این نوع انکودرها، دو خروجی را ارائه می دهند به نام های A و B که خروجی های یک چهارم نیز نامیده می شوند به این دلیل که 90 درجه اختلاف فاز دارند.
جدول های کدینگ برای چرخش ساعتگرد و پادساعتگرد، به شرح زیر می باشد:
جدول کدینگ برای چرخش ساعتگرد
کدینگ چرخش ساعتگرد
| فاز |
A |
B |
| 1 |
0 |
0 |
| 2 |
0 |
1 |
| 3 |
1 |
1 |
| 4 |
0 |
1 |
جدول کدینگ برای چرخش پاد - ساعتگرد
کدینگ چرخش پادساعتگرد
| فاز |
A |
B |
| 1 |
1 |
0 |
| 2 |
1 |
1 |
| 3 |
0 |
1 |
| 4 |
0 |
0 |
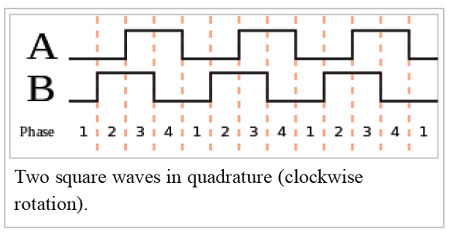
دو شکل موج خروجی، 90 درجه با یکدیگر اختلاف فاز دارند که معنی یک چهارم را بهتر نشان می دهد. این سیگنال ها، جهت ایجاد پالس های شمارش صعودی یا نزولی، کدگشایی می شوند. جهت رمزگشایی در نرم افزار، خروجی های A و B توسط نرم افزار خوانده می شوند و از جدول فوق برای رمزگشایی جهت استفاده می شود. به عنوان مثال، اگر آخرین مقدار 00 بوده و مقدار کنونی 01 باشد، به این معنی است که تجهیز یک نیم پله در جهت ساعتگرد، حرکت کرده است.
در انکودرهای با ضامن نگهدارنده، راه های مختلفی برای سئیچ بین حالت های متفاوت وجود دارد. در بعضی از آنها هر دو خروجی A و B، همیشه مدار باز هستند.
کاربرد انکودر در صنایع
انکودرهایی که در سروو موتورها مورد استفاده قرار می گیرند:
روتاری انکودرها اغلب جهت تعقیب و رهگیری موقعیت شفت موتور (در موتورهای BRUSH LESS آهنربا دائم) مورد استفاده قرار می گیرند. این موتورها معمولا در ماشین های CNC، ربات ها و تجهیزات صنعتی دیگر نصب هستند. انکودرهای Incremental، در سروو موتورهای القایی مورد استفاده قرار می گیرند، اما انکودرهای Absolute در موتورهای BRUSH LESS آهنربا دائم مورد استفاده قرار می گیرند.
در این کاربردها، انکودر نقش اساسی در اطمینان از عملکرد درست تجهیز دارد. موتورهای Brush-Type، از یک کموتاتور الکترومکانیکی جهت کنترل اینکه به چه سیم پیچی برق داده شود استفاده می کنند. در موتورهای brushless، ارتباط بصورت الکترونیکی است و انکودر درایو را جهت برق دارکردن سیم پیچ استاتور مناسب ،بسته به موقعیت مگنت موتور، فعال می کند. چنانچه جریان اعمال شده به سیم پیچ ها، زمانیکه مگنت های روتوردر یک موقعیت خاص نسبت به سیم پیچ های استاتور هستند مناسب باشد، بیشترین گشتاور قابل حصول است. چنانچه این زمانبندی درست باشد، موتور در بهترین حالت خود و اگر غلط باشد در بدترین حالت خود کار می کند. عدم تنظیم درست انکودر بر روی موتور، گاهی اوقات باعث می شود که موتور دچار وارونگی چرخش شده وشرایط خطرناک فرار موتور پیش بیاید. جهت عملکرد صحیح این موتورها، لازم است که انکودر بصورت صحیح تنظیم شود.














دیـــدگاهها
شما هم درباره این کالا دیدگاه ثبت کنید.